
En todo el mundo, 1,3millones de personas mueren cada año en colisiones del tráfico, sobre todo hombres jóvenes. Además del drama humano, el coste de un accidente es extremadamente alto para los países, un 3% de su PIB (WHO, 2018). Para afrontar la siniestralidad, la formación de los conductores debería entrenar habilidades para maniobrar mejor, procesando la información de la carretera sin sobrevalorar sus habilidades ni infraestimar el peligro.
Los primeros tests de Percepción de Peligros en el contexto español fueron creados por nuestro equipo para la DGT (https://www.dgt.es/muevete-con-seguridad/conviertete-en-un-buenconductor/test-de-prediccion-de-riesgos). También desarrollamos con la IRU (International Road Transport Organisation. Geneve: https://www.iru.org/es), el Hazard Perception Test desde la perspectiva del conductor de autobús para la acreditación externa de los conductores de ALSA.
La habilidad de predecir peligros nos permite leer la carretera, anticipando lo que va a pasar para identificar y responder a los eventos del tráfico que tienen alta probabilidad de producir una colisión. Se ha demostrado que tener una mayor habilidad de Percepción de Peligros correlaciona con el decremento de accidentes. La Toma de Decisiones depende de cómo autoevaluamos nuestra propia habilidad de conducción y de cómo calibramos el riesgo durante la conducción, en función de la estimación de los costes y beneficios que asignamos a dicho riesgo. Además, la experiencia en conducción puede mitigar el efecto que la propensión a la distracción podría tener en la predicción de peligro.
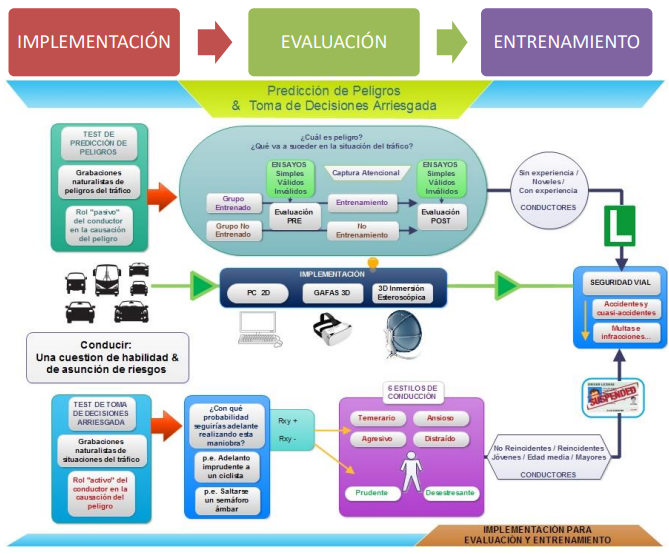
Para la construcción y validación de estos tests partimos de grabaciones de vídeos realistas de escenas del tráfico. En estos tests, el conductor puede tener un papel pasivo (sólo perceptor del peligro), como cuando un peatón se cruza de forma repentina o un ciclista invade nuestro carril, o un papel activo tomando decisiones arriesgadas como saltarse un semáforo en ámbar o realizar un adelantamiento ilegal de ciclistas (Figura 1).

Partiendo de estos desarrollos previos, en este proyecto de Prueba de Concepto abordaremos la Percepción de Peligros y la Toma de Decisiones de forma independiente, al ser procesos psicológicos conceptualmente diferentes y empíricamente separables, para evaluar la Consciencia Situacional y Emocional de los conductores. Para ello, analizaremos qué utilidad tienen distintos entornos 3D-dinámicos (realidad virtual) para evaluar y entrenar conductores de vehículos, en comparación a la aproximación tradicional de los tests implementados en ordenador y aplicaciones móviles (Figura 2).

En contextos de simulación inmersiva, reaccionamos física y emocionalmente como si el mundo virtual que nos rodea existiese realmente. Por eso, emplear la realidad virtual para entrenar la Percepción de Peligros en conductores sin experiencia les permitirá aprender a explorar la carretera como un conductor experimentado, pero sin exponerse a los riesgos de la conducción real, ni tener que adquirir costosos simuladores de conducción.
En este proyecto también analizaremos cómo infraestiman el riesgo los conductores con distintos perfiles (por ejemplo, reincidentes, jóvenes, etc.), implementando el test de Toma de Decisiones en estos contextos de realidad inmersiva (Ver Figura 3).
Los resultados de este proyecto son interesantes para organismos y empresas como la DGT, ALSA o la IRU, World Road Transport Organisation), así como Autoescuelas, Psicotécnicos, Empresas de transporte y asociaciones que promueven la prevención de accidentes (por ejemplo, STOP-accidentes y otras Asociaciones de Ayuda y Orientación a los Afectados por Accidentes de Tráfico) para su uso profesional en la formación, acreditación y detección de conductores imprudentes; y el entrenamiento de habilidades para detectar, identificar y poder reaccionar ante situaciones de peligro.
El 90 % de las colisiones de tráfico se deben a errores humanos. Los programas de entrenamiento de realidad virtual permitirán a los conductores exponerse a situaciones de riesgo en un entorno controlado, aprendiendo a detectarlos y adquiriendo habilidades para responder de forma segura. Estas tecnologías nos permitirán evaluar y corregir la predisposición al riesgo de los conductores, evitando multas, retiradas del carné y, sobre todo, siniestros.
REFERENCIAS
- Castro, C., Padilla, J.L., Doncel, P., García-Fernández, P., Ventislavova, P, Eisman, E., & Crundall, D. (2019). How are Distractibility and Hazard Prediction in driving related? Role of driving experience as moderating factor. Applied Ergonomics, 81, DOI: 10.1016/j.apergo.2019.102886
- Muela I, Chica A, Garcia-Fernandez P, & Castro C. (2021). Visual attention in realistic driving situations: Attentional capture and Hazard Prediction. Applied Ergonomics, 89, 103235. DOI: 10.1016/j.apergo.2020.103235
- Ventsislavova, P. Gugliotta, A., Peña-Suarez, E., Garcia-Fernandez, P., Eisman, E., Crundall, D. & Castro, C. (2016). What happens when drivers face hazards on the road? Accident Analysis and Prevention, 91, 43-54 DOI: 10.1016/j.aap.2016.02.013
- WHO, World Health Organisation, (2018). Global status report on road safety 2018. https://www.who.int/publications/i/item/9789241565684


Cándida Castro Ramírez, es profesora en el departamento de Psicología Experimental de la Universidad de Granada (UGR). Lleva a cabo su investigación sobre Psicología Cognitiva Aplicada, centrada en la Seguridad en el Transporte, en el CIMCYC (Centro de Investigación Mente Cerebro y Comportamiento) de la UGR. Estudia los procesos cognitivos relacionados con la conducción: conciencia de la situación (percepción, comprensión, proyección en la situación futura) y toma de decisiones. Ha recibido financiación en proyectos de investigación competitivos (17) y contratos de investigación con empresas (5). Analiza cuáles son las habilidades cognitivas que podrían compartir los conductores seguros, independientemente de los tipos de amenazas específicas para cada contexto de conducción. Estudia distintas formas de evaluación y entrenamiento de conductores. Explora la función que desempeñan sobre la ejecución de la conducción variables como el tipo de conductor (aprendiz, novel o con experiencia), el perfil de reincidencia o no, la edad, los rasgos de personalidad (búsqueda de sensaciones, impulsividad, ira, agresividad, mayor sensibilidad a la recompensa, etc.) y los estilos de conducción (imprudente, agresivo, ansioso, distraído, cauteloso o relajado etc.).